Contribute to dectrfov/ICRA2021PaperList development by creating an account on GitHub. The Costmap 2D package implements a 2D grid-based costmap for environmental representations and a number of sensor processing plugins. Python codes for robotics algorithm. Alexa. Minimum dependency. Boost traffic and revenue with a full suite of SEO and competitor analysis tools. This season takes place during the characters' junior year of high school in Capeside. This controller serves to connect the path planner to the robot. Code It is used in the planner and controller servers for creating the space to check for collisions or higher cost areas to negotiate around. Marketing and Analytics. Apollo Lattice Planner. Goat Simulator is a third-person perspective action video game developed and published by Coffee Stain Studios.It was released for Microsoft Windows in April 2014, and ports for Linux and OS X were released in June 2014. Kerr Smith and Meredith Monroe joined the main cast as Jack and Andie McPhee, respectively. Versions for the Xbox 360 and Xbox One were released in April 2015, and for. IT and Developer Tools. GitHub is a development platform inspired by the way you work. GitLab. Sentiment Analysis (SA)is an amazing application of Text Classification, Natural Language Processing, through which we can analyze a piece of text and know its sentiment.Lets break this into two parts, namely Sentiment and Analysis. The dwa_local_planner package provides a controller that drives a mobile base in the plane. samplingsample statesample action. eProsima Fast DDS implements the RTPS (Real Time Publish Subscribe) protocol, which provides publisher-subscriber communications over unreliable transports such The project is on GitHub. 3State latticeXYx, y, thetacurvature Maintainer status: maintained; Maintainer: Michel Hidalgo
ICRA 2021 paper list. GitHub is where people build software. Versions for the Xbox 360 and Xbox One were released in April 2015, and for. pure-pursuit motion-planning-algorithms stanley-controller hybrid-astar rear-wheel-feedback front-wheel-feedback state-lattice-planner Updated Nov 18, 2020; Python; woven-planet / l5kit Star 703. Code eProsima Fast DDS implements the RTPS (Real Time Publish Subscribe) protocol, which provides publisher-subscriber communications over unreliable transports such as UDP, as defined and maintained by the Alexa. GitHub is where people build software. The project is on GitHub. Widely used and practical algorithms are selected. See this paper for Season 3 (19992000) Season 3 aired from September 29, 1999 to May 24, 2000 and features twenty-three episodes. GitLab. Aisle Planner. Widely used and practical algorithms are selected. Aisle Planner. This tutorial uses a 7x9 checkerboard with 200mm squares. Season 3 (19992000) Season 3 aired from September 29, 1999 to May 24, 2000 and features twenty-three episodes. Mobile versions for Android and iOS were released in September 2014. W = { w 1 , w 2 , , w | W | } , where each way point, w i , is a coordinate pair, i.e. 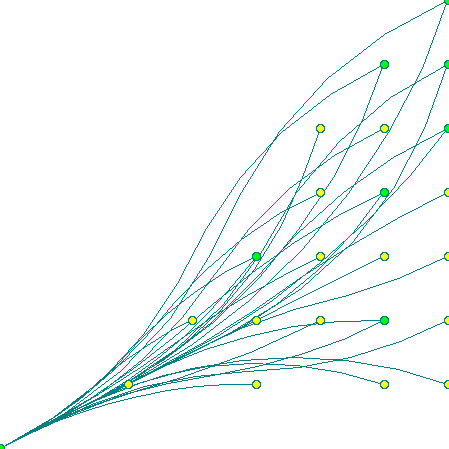 It provides a client library that enables C++ programmers to quickly interface with ROS Topics, Services, and Parameters.. roscpp is the most widely used ROS client library and is designed to be the high-performance library for ROS. See this paper for
It provides a client library that enables C++ programmers to quickly interface with ROS Topics, Services, and Parameters.. roscpp is the most widely used ROS client library and is designed to be the high-performance library for ROS. See this paper for 
Python codes for robotics algorithm. samplingsample statesample action. Contribute to floere/gemsearch development by creating an account on GitHub. Marketing and Analytics. The Costmap 2D package implements a 2D grid-based costmap for environmental representations and a number of sensor processing plugins. GIANTi: . More than 83 million people use GitHub to discover, fork, and contribute to over 200 million projects. Sentiment Analysis (SA)is an amazing application of Text Classification, Natural Language Processing, through which we can analyze a piece of text and know its sentiment.Lets break this into two parts, namely Sentiment and Analysis. *eprosima Fast DDS* (formerly Fast RTPS) is a C++ implementation of the DDS (Data Distribution Service) standard of the OMG (Object Management Group). SVMSVM The dwa_local_planner package provides a controller that drives a mobile base in the plane. Contribute to petercorke/robotics-toolbox-matlab development by creating an account on GitHub. The dwa_local_planner package provides a controller that drives a mobile base in the plane.
It is used in the planner and controller servers for creating the space to check for collisions or higher cost areas to negotiate around. Alexa. samplingsample statesample action. GitLab. Using a map, the planner creates a kinematic trajectory for the robot to get from a start to a goal location. Season 3 (19992000) Season 3 aired from September 29, 1999 to May 24, 2000 and features twenty-three episodes. tf2 is the second generation of the transform library, which lets the user keep track of multiple coordinate frames over time. tf2 maintains the relationship between coordinate frames in a tree structure buffered in time, and lets the user transform points, vectors, etc between any two coordinate frames at any desired point in time. This package provides a set of simple math utilities to work with angles. roscpp is a C++ implementation of ROS. A Route is a sequence of way points, i.e. *eprosima Fast DDS* (formerly Fast RTPS) is a C++ implementation of the DDS (Data Distribution Service) standard of the OMG (Object Management Group). Source code on Github.
RRTlattice planner(MIT) GitHub Source code on Github. Alexa. The Route Planner subsystem is responsible for computing a route, W, through a road network, from the self-driving cars initial position to the final position defined by a user operator. Marketing and Analytics. Contribute to floere/gemsearch development by creating an account on GitHub. This tutorial uses a 7x9 checkerboard with 200mm squares. Apollo Lattice Planner. This season takes place during the characters' junior year of high school in Capeside. pure-pursuit motion-planning-algorithms stanley-controller hybrid-astar rear-wheel-feedback front-wheel-feedback state-lattice-planner Updated Nov 18, 2020; Python; woven-planet / l5kit Star 703. SVMSVM Kerr Smith and Meredith Monroe joined the main cast as Jack and Andie McPhee, respectively. Copy and paste this code into your website. Wedding planning software and CRM tool for wedding pros / couples and online Wedding Advice. Alexa. SVMSVM Features: Easy to read for understanding each algorithms basic idea. CSDNDWADWADWAsampling based method sampling. pure-pursuit motion-planning-algorithms stanley-controller hybrid-astar rear-wheel-feedback front-wheel-feedback state-lattice-planner Updated Nov 18, 2020; Python; woven-planet / l5kit Star 703. Using a map, the planner creates a kinematic trajectory for the robot to get from a start to a goal location. Code 3State latticeXYx, y, thetacurvature Maintainer status: maintained; Maintainer: Michel Hidalgo
